Linux的ARM平台串口模块在嵌入式设备中具有重要作用linux arm 串口驱动,它能够使基于ARM的硬件与外部串行接口设备建立联系,完成信息的发送和接收工作。接下来将围绕几个核心环节,对其功能进行说明。
什么是串口驱动
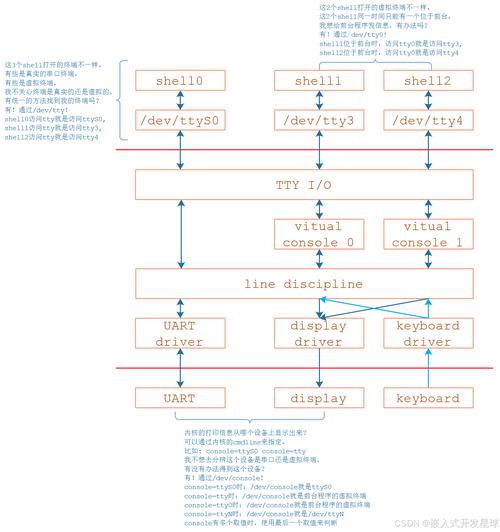
串口驱动是操作系统和串口硬件之间沟通的纽带。在 Linux ARM 系统中,它负责管理串口设备的各种功能,包括数据的发送和接收。如果没有这个驱动,系统就无法识别和使用串口设备。举例来说,在一些工业控制的 ARM 设备里,串口驱动能够让设备通过串口和传感器、执行器等部件进行信息交换。
串口驱动可以设置串口的各种参数,包括波特率、数据位和停止位等。各种外部设备对串口参数的要求可能不一样,利用驱动可以方便地更改这些参数,从而满足不同设备的要求。这就像不同人说话快慢不同,我们可以通过调整参数让双方沟通更顺畅。
串口驱动的作用
串口驱动功能非常关键,它首先能够促成不同设备间的信息交换。在许多基于ARM架构的开发平台上,人们可以借助串口将设备与电脑相连,从而把设备内部的信息传递给电脑,同时也能将电脑上的信息发送给设备。这种连接方式在开发与调试阶段十分有用,有助于我们了解设备的实际运行情况,并方便对程序进行相应的调整。
它也能增强系统运行的安全和稳固。借助串口驱动程序,系统能够监视并管理串口设备,一旦发生异常状况,可以迅速应对。比如,串口通信如果发生偏差,驱动程序能够自动进行偏差的识别和修正,确保信息传递无误。
如何编写串口驱动
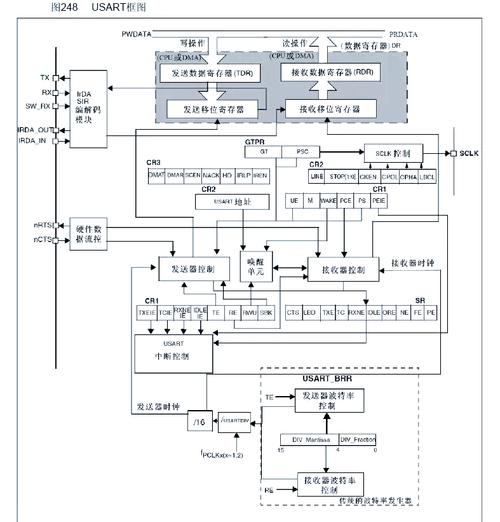
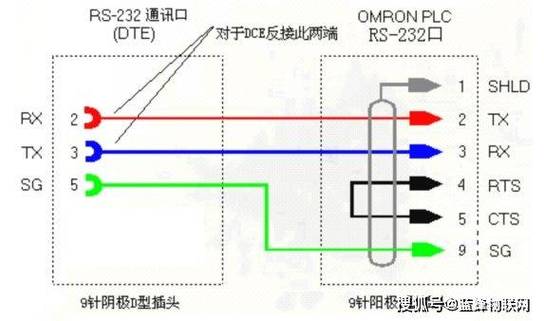
要开发 Linux ARM 串口驱动程序,首先必须明白串行端口硬件的运作机制。要清楚串口的寄存器布局、引脚对接等细节。接着,依据这些资料,借助 Linux 内核所提供的驱动体系来设计程序。程序里,必须完成串口的启动设置、数据发送以及接收等任务。
编写时需参照 Linux 内核的资料和范例程序。内核里已有大量现成的串口驱动程序深度linux,可参考这些程序的组织方式和具体做法。还要留意程序的规范度和清晰度,以便将来进行维护和增加新功能。
串口驱动的调试方法
在 Linux ARM 系统上配置串口驱动,可以通过输出日志信息来辅助排错。在程序里增加一些输出语句,显示重要变量的数据以及处理流程,有助于掌握驱动的工作状态。此外,也能借助专用软件来观察串口的数据交互,例如通用的串口检测工具。
可以打开系统内部的检测功能,这样系统会显示许多检测数据。借助这些数据,可以找出设备驱动程序的错误。一旦发现故障,需要逐层检查,先从物理接口linux arm 串口驱动,再检查程序运行过程,逐一排除可能的原因。
常见的使用场景
工业自动化中,Linux系统下的ARM处理器常配合串口驱动使用。众多工业装置借助串口与ARM控制器交换信息,用以完成数据获取和设备管理。例如,工厂环境中部署的温度感应装置、压力感应装置等,它们采集到的信息能够借助串口发送给ARM控制器,以便进行后续的运算和操作。
智能家居系统里,串口驱动也很常见,很多智能设备,比如智能门锁、智能摄像头,能依靠串口跟 ARM 网关联络,这样设备就能联网,也能远程操控,用户用手机 APP 控制它们,感觉很方便。
驱动的优化技巧
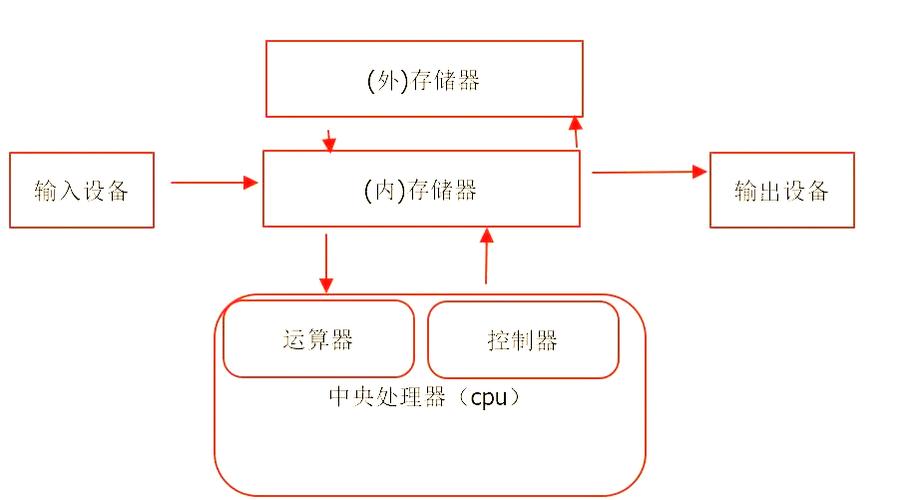
改善串口驱动的工作效率,需要调整程序代码。可以降低非必需的断电响应,防止反复转换工作状态。也能够借助 DMA 技术,提升资料传送的速度,使信息能从内存直接传到串口装置linux命令,减轻中央处理器的任务量。
合理划分代码的层级和模块同样关键。把不同的功能部分分离开来,能够增强程序的可维护程度和后续拓展能力。要增加新的功能,只需在对应的模块里动手改动,不会波及其他代码部分。
使用 Linux ARM 串口驱动时,你有没有碰到过什么麻烦事?可以在评论区告诉大家你的经历,如果觉得这篇文章挺有帮助的,别忘了点个赞再转发一下。
