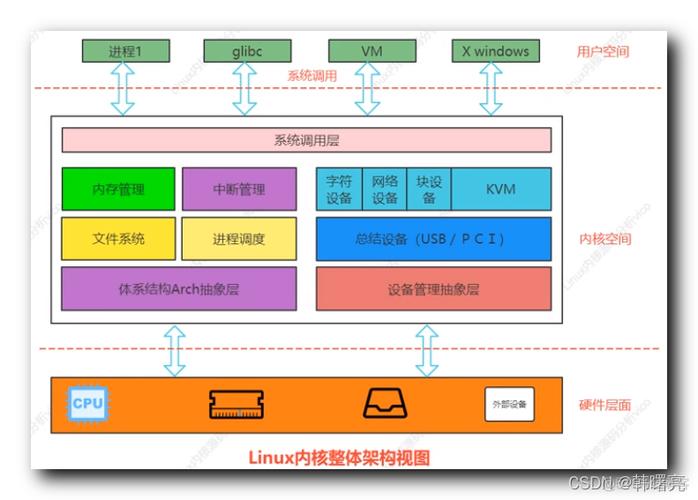
什么是用户空间SPI以及为什么需要它
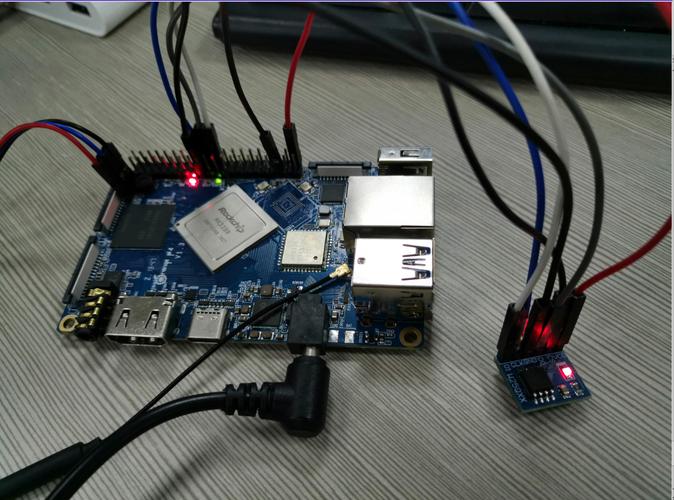
在Linux系统中,SPI(串行外设接口)总线通常由内核驱动程序管理,开发者需要编写内核模块才能与SPI设备通信。但对于很多嵌入式应用、原型开发或快速验证场景,编写内核驱动显得过于笨重。用户空间SPI访问提供了一种更轻量的方式,让应用程序可以直接通过设备文件与SPI设备交互,无需编译内核模块。这种机制特别适合树莓派、BeagleBone等单板计算机上的传感器读取、LCD屏驱动或简单外设控制。
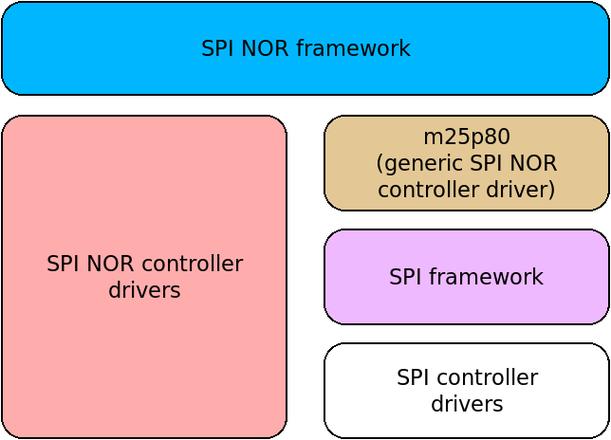
Linux内核从较早版本就支持通过spidev驱动将SPI总线暴露给用户空间。当SPI控制器驱动注册时,可以绑定spidev驱动,从而在/dev/目录下生成类似/dev/spidev0.0的设备节点。应用程序只需打开这个文件,使用ioctl系统调用即可配置SPI模式和速率,然后通过read和write传输数据。这种方式极大地降低了SPI开发的门槛。
如何配置内核和设备树支持用户空间SPI
要让Linux系统支持用户空间SPI,首先需要确保内核编译时启用了CONFIG_SPI_SPIDEV选项。这个选项位于Device Drivers -> SPI support -> User mode SPI device driver support。如果使用预编译内核,可以检查/boot/config-<strong>或/proc/config.gz确认是否包含CONFIG_SPI_SPIDEV=y。
在设备树层面linux 用户空间使用sp,需要在SPI控制器的子节点中显式指定使用spidev驱动。例如在树莓派的设备树中,可以添加类似这样的片段:
&spi0 {
status = "okay";
spidev@0 {
compatible = "spidev";
reg = <0>;
spi-max-frequency = <1000000>;
};
};
需要注意的是,某些内核版本对spidev的兼容字符串有严格限制,可能需要使用linux,spidev或具体设备名称。如果遇到Device not found错误,可以检查内核日志dmesg确认设备树是否正确解析。完成配置后重新编译设备树并重启系统,就能看到/dev/spidevX.Y设备节点。
常用SPI用户空间编程接口详解
用户空间SPI编程主要依赖三个关键的ioctl命令:SPI_IOC_RD_MODE、SPI_IOC_WR_MODE和SPI_IOC_MESSAGE。前两个用于读取和设置SPI模式(包括极性、相位和位序),后者用于执行数据传输。SPI模式通过一个8位整数表示,其中低两位定义时钟极性和相位linux 用户空间使用sp,第三位定义位序。
传输数据时,最常用的是spi_ioc_transfer结构体,它包含发送缓冲区指针、接收缓冲区指针、传输长度、速度、延迟等字段。通过SPI_IOC_MESSAGE传参可以一次性发送多个传输段,实现全双工通信。下面是一个典型的读取SPI设备ID的代码片段:
int fd = open("/dev/spidev0.0", O_RDWR);
uint8_t tx[] = {0x9F, 0, 0, 0}; // 读ID命令
uint8_t rx[4] = {0};
struct spi_ioc_transfer tr = {
.tx_buf = (unsigned long)tx,
.rx_buf = (unsigned long)rx,
.len = 4,
.speed_hz = 500000,
.delay_usecs = 0,
.bits_per_word = 8,
};
ioctl(fd, SPI_IOC_MESSAGE(1), &tr);
这段代码向SPI设备发送4个字节,同时接收4个字节的响应。实际应用中,要注意缓冲区对齐和字节序问题。对于只发不收或只收不发的场景,可以将对应的缓冲区指针设为NULL。
实践中的常见问题与性能优化建议
用户空间SPI虽然方便,但并非万能方案。最典型的限制是延迟不可控——由于涉及到上下文切换和ioctl系统调用,每次传输的延迟通常在微秒级别,对于需要精确时序的设备(如某些RFID模块)可能不够。另外,用户空间SPI不支持DMA传输linux服务器维护,大批量数据交换时CPU占用率较高。
解决延迟问题的变通方法是利用spidev支持的预置传输功能:将多个spi_ioc_transfer结构体打包到一个SPI_IOC_MESSAGE调用中,减少系统调用次数。对于需要低延迟的场景,还可以考虑将SPI设备挂到高速SPI控制器上,并适当提升时钟频率,但要注意设备规格限制。
同时需要注意权限问题:默认情况下/dev/spidev</strong>设备节点属于root用户嵌入式linux驱动程序设计从入门到精通,普通用户无法访问。可以通过udev规则设置权限,例如在/etc/udev/rules.d/99-spi.rules中添加SUBSYSTEM=="spidev", MODE="0666",或者将用户加入spi组。另外,多个进程同时访问同一SPI设备会导致数据错乱,必须在应用层实现互斥机制。
还有一点容易被忽视:不同SPI设备的电气特性差异很大,使用前务必确认工作电压和逻辑电平是否匹配。树莓派等3.3V的GPIO不能直接连接5V的SPI设备,需要电平转换芯片。用户空间SPI虽然简化了软件层面的工作,但硬件层面的基础检查绝不能省略。
