SPI(Serial Peripheral Interface)是一种常用的同步串行通信协议linux deepin,在嵌入式Linux系统中广泛应用于传感器、显示屏、存储器等外设的通信。对于驱动开发者来说,掌握Linux SPI驱动的基本结构和编写方法,是打通硬件与软件桥梁的关键一步。本文将通过一个完整的驱动例程,带你理解SPI驱动的核心要素。
如何编写一个简单的SPI设备驱动
编写一个基本的SPI设备驱动,需要从Linux内核的SPI子系统入手。内核提供了统一的接口,让开发者不必关心底层硬件细节,只需专注于设备特定的逻辑。首先,你需要包含必要的头文件,比如#include <linux/spi/spi.h>和#include <linux/module.h>。
驱动的入口函数通常使用spi_register_board_info或设备树来注册设备,但在驱动内部,主要通过spi_driver结构体来描述。这个结构体包含probe和remove回调,分别对应设备加载和卸载时的操作。举个例子,在probe函数中,你通常会获取设备实例,初始化SPI通信参数,然后注册字符设备或输入子系统。
需要注意的是,SPI通信的硬件参数必须在probe中通过spi_setup设置,包括模式、最大频率、位宽等。如果参数不当,设备可能无法正常工作。下面是一段典型的probe函数片段:
static int my_spi_probe(struct spi_device spi)
{
spi->mode = SPI_MODE_0;
spi->max_speed_hz = 1000000;
spi_setup(spi);
// 注册字符设备或其他子系统
return 0;
}
SPI数据传输和读写操作怎么实现
SPI的数据传输是通过spi_transfer和spi_message两个核心结构完成的。spi_transfer定义了一次传输的缓冲区、长度和速度等属性,而spi_message则是一个或多个spi_transfer的集合linux spi驱动例程,用于在一次片选信号内完成多次交互。
在实际读写操作中,你通常会构建一个spi_message,添加多个spi_transfer,然后通过spi_sync或spi_async提交给SPI控制器。spi_sync是同步调用,会阻塞直到传输完成,适合简单场景;spi_async是异步调用,需要提供完成回调,适合高并发或实时性要求高的系统。
例如,读取一个传感器的寄存器值linux操作系统介绍,需要先发送寄存器地址,再接收数据,这个流程可以用两个transfer来实现:
static int spi_read_reg(struct spi_device spi, u8 reg, u8 val)
{
struct spi_transfer txfer = {
.tx_buf = ®,
.len = 1,
};
struct spi_transfer rxfer = {
.rx_buf = val,
.len = 1,
};
struct spi_message msg;
spi_message_init(&msg);
spi_message_add_tail(&txfer, &msg);
spi_message_add_tail(&rxfer, &msg);
return spi_sync(spi, &msg);
}
这个例子展示了最基本的读写模式,实际项目中你还需要考虑错误处理、超时机制以及DMA支持,以提高传输效率。
驱动例程完整代码和关键点解析
下面是一个完整的SPI字符设备驱动例程,实现了简单的打开、读取和写入接口。这个驱动挂载在一个SPI从设备上,内核版本基于4.x以上。
#include <linux/module.h>
#include <linux/spi/spi.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#define DEVICE_NAME "my_spi_dev"
static struct spi_device g_spi;
static int major;
static int my_spi_open(struct inode inode, struct file file)
{
return 0;
}
static ssize_t my_spi_read(struct file file, char __user buf, size_t len, loff_t off)
{
u8 kern_buf = kzalloc(len, GFP_KERNEL);
struct spi_transfer t = {
.rx_buf = kern_buf,
.len = len,
};
struct spi_message m;
spi_message_init(&m);
spi_message_add_tail(&t, &m);
spi_sync(g_spi, &m);
copy_to_user(buf, kern_buf, len);
kfree(kern_buf);
return len;
}
static ssize_t my_spi_write(struct file file, const char __user buf, size_t len, loff_t off)
{
u8 kern_buf = kzalloc(len, GFP_KERNEL);
copy_from_user(kern_buf, buf, len);
struct spi_transfer t = {
.tx_buf = kern_buf,
.len = len,
};
struct spi_message m;
spi_message_init(&m);
spi_message_add_tail(&t, &m);
spi_sync(g_spi, &m);
kfree(kern_buf);
return len;
}
static struct file_operations fops = {
.owner = THIS_MODULE,
.open = my_spi_open,
.read = my_spi_read,
.write = my_spi_write,
};
static int probe(struct spi_device spi)
{
g_spi = spi;
major = register_chrdev(0, DEVICE_NAME, &fops);
return 0;
}
static int remove(struct spi_device spi)
{
unregister_chrdev(major, DEVICE_NAME);
return 0;
}
static struct spi_driver my_driver = {
.driver = {
.name = "my_spi",
},
.probe = probe,
.remove = remove,
};
module_spi_driver(my_driver);
MODULE_LICENSE("GPL");
这个例程的关键在于,probe函数中保存了SPI设备指针,字符设备操作函数直接通过该指针进行同步传输。你可以在用户空间通过/dev/my_spi_dev进行读写linux spi驱动例程,底层会自动处理SPI时序。不过,实际产品中需要增加设备树匹配、并发保护以及更完善的错误处理。
调试和常见问题怎么快速解决
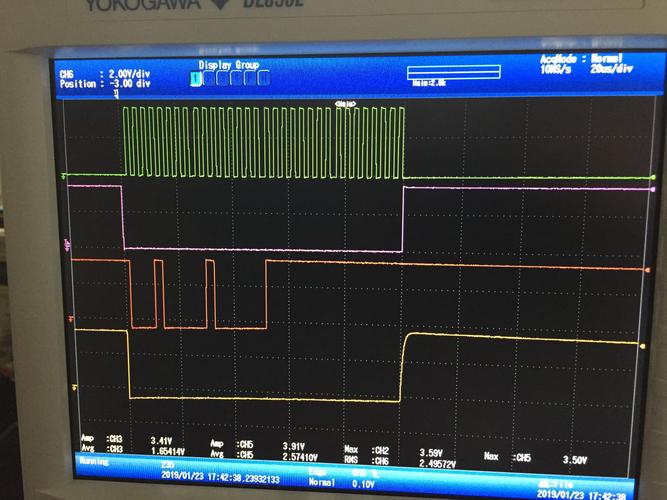
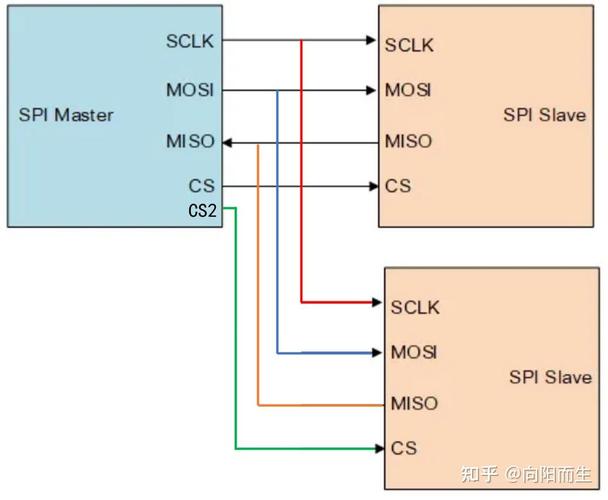
调试SPI驱动时,最常见的问题是数据传输不正确或设备无响应。可以先检查硬件连接,包括SCLK、MOSI、MISO和CS引脚是否正确,电平是否匹配。在软件层面,使用内核的spidev驱动可以快速验证通信是否正常,这个驱动允许用户空间直接通过ioctl进行SPI传输。
如果通信不稳定,检查SPI模式是否匹配。SPI有四种模式,由时钟极性(CPOL)和相位(CPHA)决定,主设备和从设备必须一致。另外,最大频率不能超过从设备支持的规格,否则数据可能错乱。使用devicetree时,确保节点的compatible属性和驱动匹配,reg字段对应正确的片选编号。
数据错位往往是因为位宽设置错误。比如,从设备要求8位数据,而驱动配置成了16位,接收到的字节就会乱掉。通过spi_setup打印配置参数,或者用逻辑分析仪抓取波形,都能快速定位问题根源。
