对于许多嵌入式初学者来说,s3c2440这颗经典的ARM9处理器搭配Linux系统,是踏入驱动开发大门的最佳敲门砖。然而,从零开始编写第一个驱动程序,往往让人感到无从下手。本文将结合我多年的开发经验,从驱动框架、编译加载到调试技巧,一步步带你理清s3c2440 Linux驱动的核心脉络。
驱动开发需要什么环境
你需要搭建一套完整的交叉编译环境。针对s3c2440芯片,通常使用arm-linux-gcc 4.4.3或更高版本的交叉工具链。安装好工具链后,还要准备一份已经移植好内核源码的Linux系统,比如Linux-2.6.30或3.4.2版本。内核源码树必须预先编译通过,因为驱动编译时需要依赖内核的配置头文件和模块编译系统。
硬件环境必不可少。一块搭载s3c2440的开发板,例如友善之臂的mini2440或TQ2440,并配好串口线、JTAG烧写器和电源。宿主机建议使用Ubuntu 12.04或14.04这类老版本系统s3c2440 linux 驱动,因为新系统对旧版工具链的支持可能不完整。搭建好NFS网络文件系统,可以大幅提高驱动调试效率,避免反复烧写内核镜像。
s3c2440驱动框架怎么理解
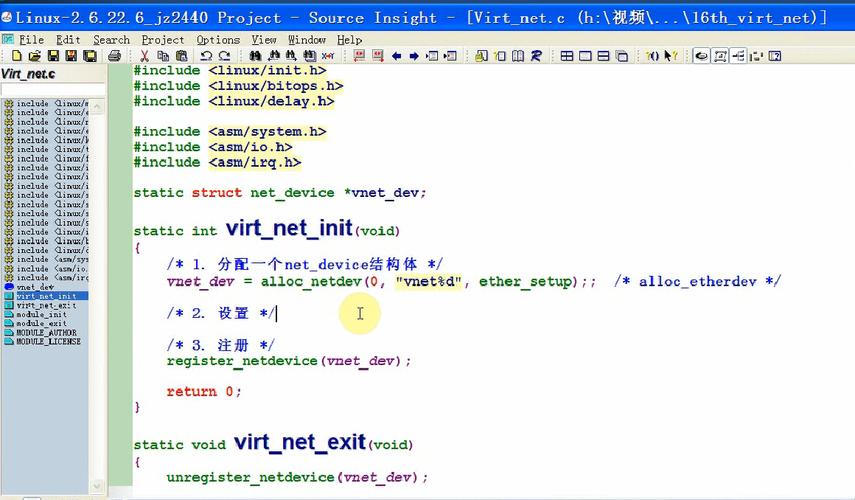
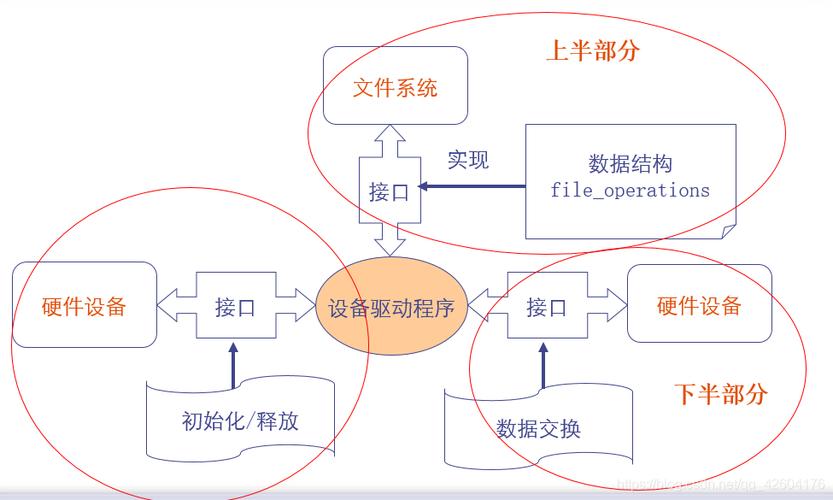
s3c2440上的Linux驱动依然遵循标准Linux驱动模型,分为字符设备、块设备和网络设备三大类。对于初学者,字符设备驱动是最容易入手的,比如控制LED灯、按键或蜂鸣器。内核提供了cdev结构体来管理字符设备,你需要实现open、read、write等函数接口,并通过register_chrdev_region或alloc_chrdev_region来申请设备号。
具体到s3c2440硬件特性,驱动开发必须熟悉芯片的数据手册。因为每个外设的控制寄存器地址、位定义都与硬件强相关。例如编写GPIO驱动,你要通过ioremap映射GPIO控制寄存器的物理地址到内核虚拟地址,然后直接读写寄存器来设置输入输出方向和电平。理解框架的关键是区分“驱动代码”和“硬件操作代码”,前者是通用的Linux机制,后者是与s3c2440绑定的。
如何编译第一个s3c2440驱动
编写最简单的LED驱动linux rar,可以把它编译成内核模块。你需要创建一个Makefile红旗 linux,内容指定内核源码目录和交叉编译器的前缀。具体来说,Makefile里要设置KDIR指向你的s3c2440内核源码路径,然后使用make -C $(KDIR) M=$(PWD) modules命令来编译。模块源码需要包含linux/init.h、linux/module.h和linux/fs.h等头文件,并定义module_init和module_exit入口点。
编译成功后,会生成一个.ko文件。把它通过NFS或U盘拷贝到s3c2440开发板上,然后使用insmod命令加载模块。加载时可以通过dmesg查看内核打印的信息,确认probe函数是否执行成功。如果需要在开机时自动加载,可以将ko文件放入开发板的/lib/modules/目录下,并在etc/init.d/rcS中添加加载脚本。第一个驱动最好只打印Hello World,不操作硬件,这样容易排除问题。
驱动中设备树的作用是什么
较新版本的Linux内核(3.x以上)在s3c2440上也开始逐步引入设备树(Device Tree)来描述硬件。设备树是一个文本文件,扩展名为.dts,它详细列出了CPU、内存、中断控制器和各个外设的地址范围及其属性。使用设备树后s3c2440 linux 驱动,驱动代码不再需要硬编码寄存器地址和中断号,而是通过of_property_read_u32等函数从设备树节点中动态获取配置信息。
对于s3c2440来说,传统的板级文件(arch/arm/mach-s3c2440/mach-mini2440.c)方式正在被设备树替代。好处是同一份驱动内核可以适配不同板卡,只需更换设备树文件即可。比如LED设备节点可以定义gpios属性,指明使用的GPIO引脚和有效电平。驱动中使用gpiod_get函数获取描述符,再调用gpiod_set_value控制LED。使用设备树前,务必确认你的内核配置开启了CONFIG_OF选项。
驱动调试有哪些实用技巧
打印信息是最直接的调试武器。在s3c2440驱动代码中使用printk,并指定不同的日志级别KERN_ERR、KERN_INFO等,然后通过开发板的串口终端实时查看输出。你可以通过修改/proc/sys/kernel/printk来调整终端的打印级别,避免遗漏重要信息。更高级的调试可以用动态调试,在需要调试的地方加上pr_debug,然后通过echo “file driver.c +p” > /sys/kernel/debug/dynamic_debug/control开启。
如果驱动发生内核崩溃或段错误,千万不要慌张。首先记住错误发生时的PC指针和调用栈信息,然后使用arm-linux-objdump反汇编生成的.ko文件或vmlinux,定位到出错的代码行。另外一种常用工具是kgdb,需要在内核配置时开启KGDB选项,并通过串口进行源码级调试。对于GPIO和中断相关的问题,可以用gpio和procfs下的中断信息节点来排查,例如cat /proc/interrupts查看中断计数是否增加。
常见驱动问题怎么解决
编译驱动时最常见的错误是找不到内核头文件或版本不匹配。请检查你的Makefile中KDIR路径是否正确,并且该内核目录已经执行过make modules_prepare。如果出现“implicit declaration of function”之类的警告,多半是缺少某个头文件的包含,查阅内核API文档添加对应头文件即可。对于s3c2440特有的寄存器操作,一定要使用readl和writel函数,而不能直接用指针解引用,否则会导致内存访问异常。
当驱动加载后设备节点没有出现在/dev目录下,通常是因为没有调用device_create创建设备文件。在驱动初始化时,要先分配类(class_create),再为每个设备创建设备(device_create)。另外,还要确认你在注册字符设备时正确传递了file_operations结构体。如果问题出在中断请求上,检查中断号是否正确、中断触发方式是否匹配硬件,并使用request_irq的返回值来诊断失败原因。
你在实际开发s3c2440 Linux驱动时,遇到过最棘手的问题是什么?欢迎在评论区分享你的调试经历,也别忘了点赞转发,帮助更多嵌入式开发者少走弯路。
